bladeGPSでGPS信号シミュレータを長時間動かし続けることが
できるようになったので,次のステップとして任意のマルチパスを
生成できるようにしてみます.
これは,従来の直達波に対して,反射などによる時間遅延を模擬した
コード遅延を加えたレンジのを生成するチャンネルを,マルチパスの
数だけ加えることになります.
まずは試験的に,各直達波に対して,1つのマルチパスを加える
ことにしました.正しくマルチパスが生成されているかどうかを確認
するために,意図的に直達波とマルチパスの搬送波は同位相とし,
信号強度も同じにしています.つまり,2つの同じ相関波形が,
時間遅延分だけ離れて観測できることになります.
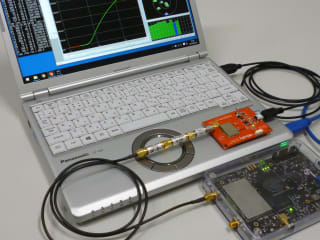
受信側には,もう1台,別のbladeRFを準備して,シミュレータから
送信された信号をサンプリングし,I/Qデータをファイルに保存します.
OSQZSS:
bladeRFで再挑戦
シミュレータ側の帯域は2.5MHzしかありませんが,相関波形の形状が
判りやすいように,受信側のサンプリン周波数は16MHzにしています.
![]()
(クリックで拡大)
コード遅延は,PRN番号の早い順に50mづつ加算しています.
遅延が小さなマルチパスは,直達波と同位相で加算される
ことになり,相関値が2倍になります.
![]()
(クリックで拡大)
時間遅延が増え,2つの相関波形が離れて行くと,それに応じて
相関値も線形的に減少します.そして,1チップ分(300m)離れると,
一方の相関波形の頂点にもう一方の相関波形が重ならなくなり,
相関値はそれ以上小さくなりません.
それが,上図ではPRN21にあたります.このときの相関波形は,
理想的には台形になります.
![]()
(クリックで拡大)
マルチパスが直達波から1チップ以上離れると,相関値のピークが
2つ観測されるようになります.
![]()
(クリックで拡大)
それらが次第に離れて行く様子も確認できました.
![]()
(クリックで拡大)
同じはずの直達波とマルチパスの信号強度に,多少差がありますが,
ほぼ意図した通りの理想的なマルチパスの生成が確認できました.
マルチパスの時間遅延や搬送波の位相差が一定ということは
実環境ではありえませんので,より現実的なマルチパスモデルを
組み込んで行きたいと思います.
シミュレータが生成する信号の数は,単純に倍になっていますが,
CPUの処理能力にはまだまだ余裕があります.直達波ごとの
マルチパスも,複数生成できそうです.
さて,マルチパスのシミュレーションで,直達波をライブのGPS信号,
マルチパスをspoofing信号と仮定すれば,spooferによるGPS信号の
乗っ取りも模擬できることになります.
電波法により,spoofing信号を屋外で送信し,ライブのGPS信号と
同時に受信させることは難しいので,シミュレータによる模擬的な
環境で,各種受信機のspoofing耐性を評価したいなと妄想中.