USRP N210の動作が確認できたので,いつものようにGPS信号を受信してみます.
受信した信号をファイルに記録するために,UHD examplesのひとつである
rx_samples_to_fileを使います.
$ ./rx_samples_to_file --file gps.bin --type short --nsamp 5000000 --rate 5000000 --freq 1575420000 --gain 40
linux; GNU C++ version 4.8.2; Boost_105400; UHD_003.008.000-14-ga90a6af0
Creating the usrp device with: ...
-- Opening a USRP2/N-Series device...
-- Current recv frame size: 1472 bytes
-- Current send frame size: 1472 bytes
Using Device: Single USRP:
Device: USRP2 / N-Series Device
Mboard 0: N210r4
RX Channel: 0
RX DSP: 0
RX Dboard: A
RX Subdev: WBXv3 RX+GDB
TX Channel: 0
TX DSP: 0
TX Dboard: A
TX Subdev: WBXv3 TX+GDB
Setting RX Rate: 5.000000 Msps...
Actual RX Rate: 5.000000 Msps...
Setting RX Freq: 1575.420000 MHz...
-- Tune Request: 1575.420000 MHz
-- The RF LO does not support the requested frequency:
-- Requested LO Frequency: 1575.420000 MHz
-- RF LO Result: 1575.421245 MHz
-- Attempted to use the DSP to reach the requested frequency:
-- Desired DSP Frequency: 0.001245 MHz
-- DSP Result: 0.001245 MHz
-- Successfully tuned to 1575.420000 MHz
--
Actual RX Freq: 1575.420000 MHz...
Setting RX Gain: 40.000000 dB...
Actual RX Gain: 38.000000 dB...
Waiting for "lo_locked": ++++++++++ locked.
Done!
N210のRXゲインは,最大で38dBのようです.
データレートは5MHzにダウンコンバートしています.
bladeRFなどでは,サンプリング周波数とベースバンドフィルタの帯域を
ユーザが指定することができますが,N210のアーキテクチャは異なります.
Ettus Research: USRP Bandwidth
RX2のラインでは,カットオフ周波数40MHzのLPFを通ったアナログ信号が,
ADCによって100MHzのサンプリング周波数でデジタル化されます.
それをDDC(digital down converter)によって,デシメーションしています.
記録されたデジタル信号のPSDはこんな感じ.
ベースバンドフィルタの帯域を指定できるbladeRFとは,大きく異なります.
![]() (クリックで拡大)
(クリックで拡大)
DCオフセットは少なめ.
![]() (クリックで拡大)
(クリックで拡大)
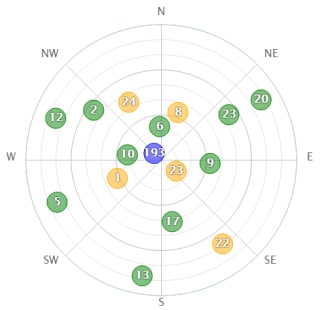
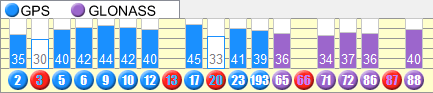
GPS信号も問題なく見つかりますが,ノイズフロアがかなり不安定です.
GPS信号用のBPFをRFラインに挿入した方が良いのかな?
![]() (クリックで拡大)
(クリックで拡大)
![]() (クリックで拡大)
(クリックで拡大)
とりあえず受信の確認はできたので,次はTXに挑戦しよう.
受信した信号をファイルに記録するために,UHD examplesのひとつである
rx_samples_to_fileを使います.
$ ./rx_samples_to_file --file gps.bin --type short --nsamp 5000000 --rate 5000000 --freq 1575420000 --gain 40
linux; GNU C++ version 4.8.2; Boost_105400; UHD_003.008.000-14-ga90a6af0
Creating the usrp device with: ...
-- Opening a USRP2/N-Series device...
-- Current recv frame size: 1472 bytes
-- Current send frame size: 1472 bytes
Using Device: Single USRP:
Device: USRP2 / N-Series Device
Mboard 0: N210r4
RX Channel: 0
RX DSP: 0
RX Dboard: A
RX Subdev: WBXv3 RX+GDB
TX Channel: 0
TX DSP: 0
TX Dboard: A
TX Subdev: WBXv3 TX+GDB
Setting RX Rate: 5.000000 Msps...
Actual RX Rate: 5.000000 Msps...
Setting RX Freq: 1575.420000 MHz...
-- Tune Request: 1575.420000 MHz
-- The RF LO does not support the requested frequency:
-- Requested LO Frequency: 1575.420000 MHz
-- RF LO Result: 1575.421245 MHz
-- Attempted to use the DSP to reach the requested frequency:
-- Desired DSP Frequency: 0.001245 MHz
-- DSP Result: 0.001245 MHz
-- Successfully tuned to 1575.420000 MHz
--
Actual RX Freq: 1575.420000 MHz...
Setting RX Gain: 40.000000 dB...
Actual RX Gain: 38.000000 dB...
Waiting for "lo_locked": ++++++++++ locked.
Done!
N210のRXゲインは,最大で38dBのようです.
データレートは5MHzにダウンコンバートしています.
bladeRFなどでは,サンプリング周波数とベースバンドフィルタの帯域を
ユーザが指定することができますが,N210のアーキテクチャは異なります.
Ettus Research: USRP Bandwidth
RX2のラインでは,カットオフ周波数40MHzのLPFを通ったアナログ信号が,
ADCによって100MHzのサンプリング周波数でデジタル化されます.
それをDDC(digital down converter)によって,デシメーションしています.
記録されたデジタル信号のPSDはこんな感じ.
ベースバンドフィルタの帯域を指定できるbladeRFとは,大きく異なります.
 (クリックで拡大)
(クリックで拡大)DCオフセットは少なめ.
 (クリックで拡大)
(クリックで拡大)GPS信号も問題なく見つかりますが,ノイズフロアがかなり不安定です.
GPS信号用のBPFをRFラインに挿入した方が良いのかな?
 (クリックで拡大)
(クリックで拡大) (クリックで拡大)
(クリックで拡大)とりあえず受信の確認はできたので,次はTXに挑戦しよう.